
|
41516| 7
|
[图文教程] AVL Cruise前向仿真(Simulation 1~5)算法详解 |
|
Cruise软件中通常选择前向算法(Simulation 1、2、3、4、5)进行循环工况、原地起步加速、超越加速仿真; 前向算法相比后向算法,可以得到更精确的仿真结果; 其中,显式算法通常需要设置较小的步长以确保稳定性和精度,隐式算法可以设置较大的步长,但需要进行迭代计算,因此相同步长情况下的仿真效率比显式算法要低; 相关教程: AVL Cruise静态(Stationary)算法详解 AVL Cruise准静态(Quasi Stationary)算法详解 本教程主要包含以下内容: Simulation 1、2、3、4、5算法特点简介; 各前向仿真算法步长设置建议; 各前向仿真算法对比总结; 降低内存和提高仿真效率的方法介绍; 常用对比验证方法介绍; 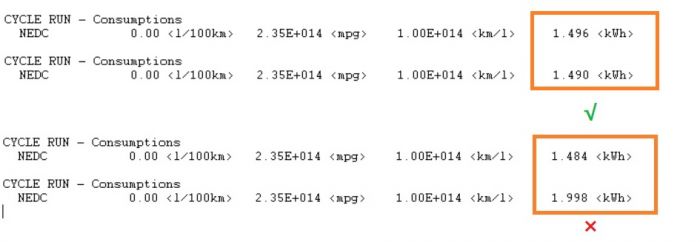 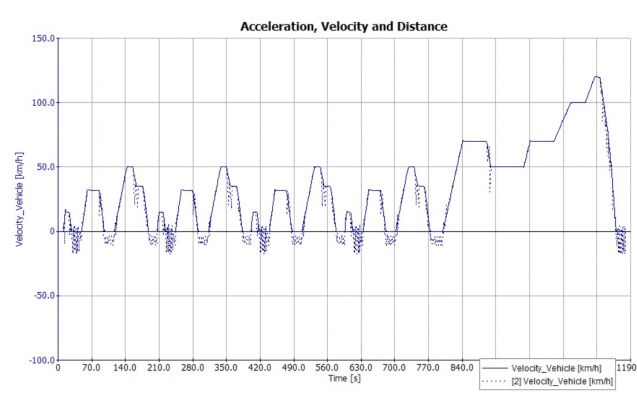 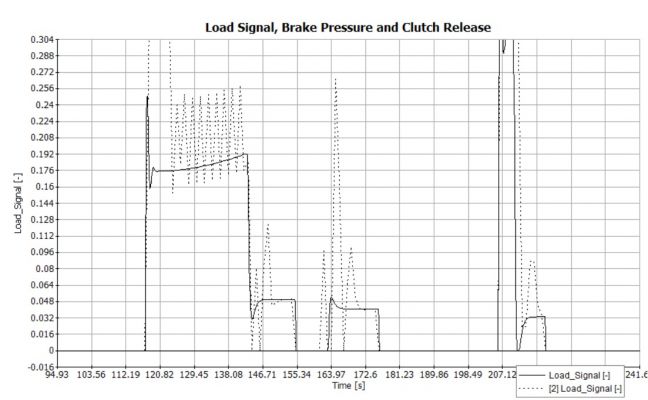 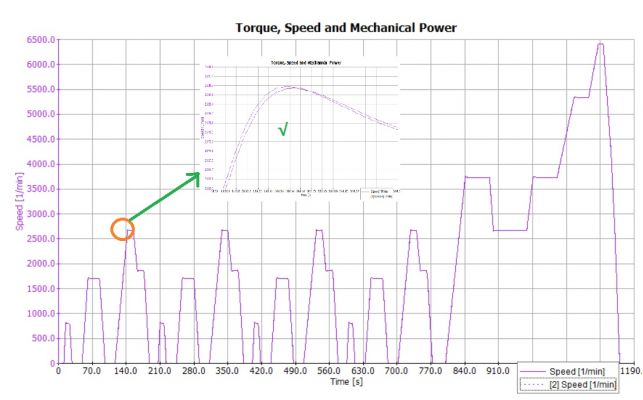
购买主题
已有 44 人购买
本主题需向作者支付 10 金币 才能浏览
本帖被以下淘专辑推荐: | |




 发表于 2020-5-4 16:29:42
发表于 2020-5-4 16:29:42
|
| |
 发表于 2021-4-12 11:26:07
发表于 2021-4-12 11:26:07
| ||
 楼主
楼主
| ||
| ||
| ||
| ||