AVL Cruise前向仿真(Simulation 1~5)算法详解
摘要: Cruise软件中通常选择前向算法(Simulation 1、2、3、4、5)进行循环工况、原地起步加速、超越加速仿真;
前向算法相比后向算法,可以得到更精确的仿真结果;
其中,显式算法通常需要设置较小的步长以确保稳定性和 ...
| Cruise软件中通常选择前向算法(Simulation 1、2、3、4、5)进行循环工况、原地起步加速、超越加速仿真; 前向算法相比后向算法,可以得到更精确的仿真结果; 其中,显式算法通常需要设置较小的步长以确保稳定性和精度,隐式算法可以设置较大的步长,但需要进行迭代计算,因此相同步长情况下的仿真效率比显式算法要低; 相关教程: AVL Cruise静态(Stationary)算法详解 AVL Cruise准静态(Quasi Stationary)算法详解 本教程主要包含以下内容: Simulation 1、2、3、4、5算法特点简介; 各前向仿真算法步长设置建议; 各前向仿真算法对比总结; 降低内存和提高仿真效率的方法介绍; 常用对比验证方法介绍; 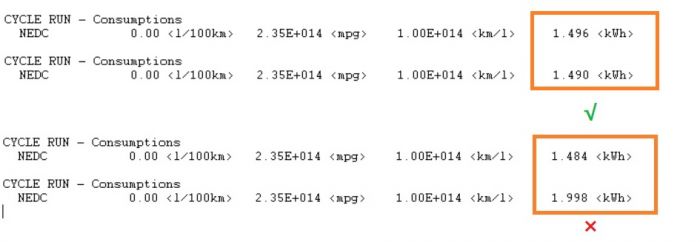 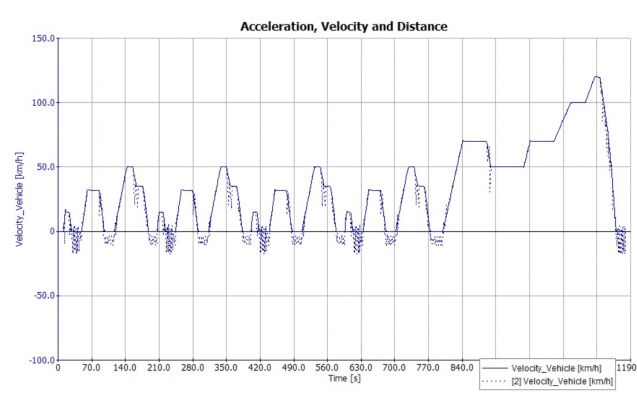 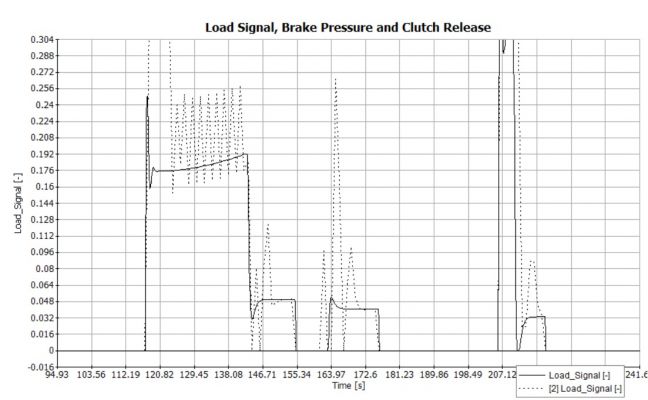 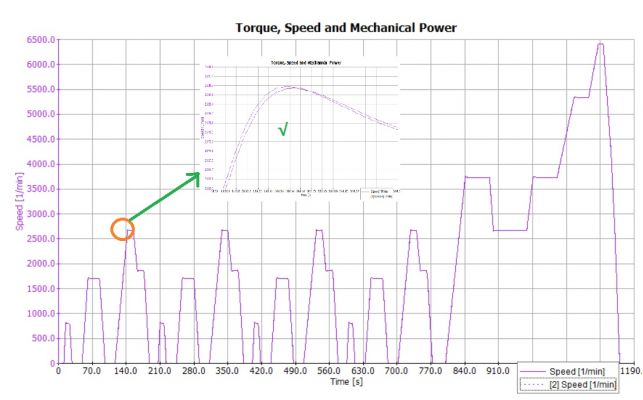 AVL Cruise前向仿真(Simulation 1~5)算法详解(详细内容): https://autosim.club/thread-73-1-1.html |



发表评论
最新评论
- 引用 18437923866
- 什么垃圾
- 引用 张敬堂
张敬堂 发表于 2021-8-20 11:06
仿真步长怎么更改
知道了 就是回复也要耗掉一个币有点坑
- 引用 autosim
张敬堂 发表于 2021-8-20 11:31
知道了 就是回复也要耗掉一个币有点坑
铜板每天登录会自动增加的,发帖和回帖铜板减少是为了尽量避免产生无意义内容。
- 引用 yieravl
autosim 发表于 2021-8-20 13:53
铜板每天登录会自动增加的,发帖和回帖铜板减少是为了尽量避免产生无意义内容。 ...
楼主,请问上面图中的四种损耗计算结果分别对应什么算法?
- 引用 autosim
yieravl 发表于 2022-4-29 16:30
楼主,请问上面图中的四种损耗计算结果分别对应什么算法?
没必要纠结这个,时间太久我也记不清了。
那几张图片是举例说明通过不同算法或步长设置相互校验仿真结果可信度,主要演示了“总结”里描述的一些情况,例如加速度的局部振荡。
理解好“总结”里的内容即可,具体算法不重要,可以自己试。