AVL Cruise基础教程:Differential模块详解
摘要: AVL Cruise的Differential模块,在仿真车辆模型中主要用来模拟差速器,差速器的原理这里我们就不再介绍了。
Differential模块-Properties
在Differential模块-Properties中,只有“Losses”一个设置项,可以选择Cr ...
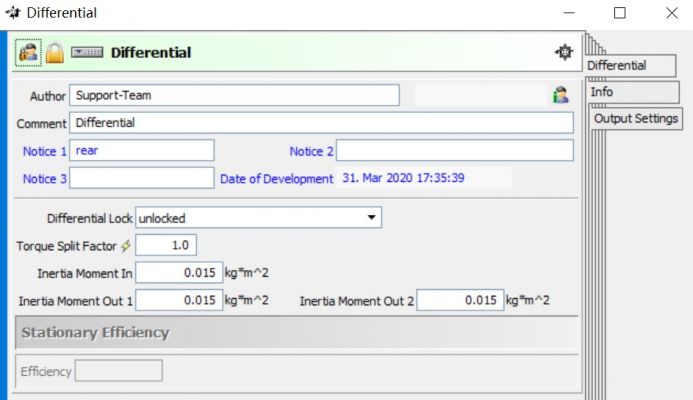 AVL Cruise的Differential模块,在仿真车辆模型中主要用来模拟差速器,差速器的原理这里我们就不再介绍了。 AVL Cruise - Differential模块 - Properties 在Differential模块-Properties中,只有“Losses”一个设置项,可以选择Cruise软件仿真时是否考虑差速器的效率; 对于理论或学术研究,可以给仿真车辆模型的Differential模块定义单独的效率值,但在实际工程应用的时候,台架上一般只能测得总成件的效率; 例如:对于某纯电动汽车的单级减速器总成,供应商提供了该总成的效率值,我们在搭建Cruise整车模型的时候,一般将该效率值定义在Single Ratio Transmission模块中,而Differential模块-Properties中,我们设置“Losses”为“Deactivated”; AVL Cruise - Differential模块 - 用户定义参数 1、Differential Lock 差速锁 当选择unlocked时,Differential模块output2和output1输出的扭矩值一直保持相同,但转速值可以不同; 当选择locked时,Differential模块output2和output1输出的转速值一直保持相同,但扭矩值可以不同; 当选择Torque Factor from Data Bus 时,扭矩分配系数将通过数据总线来定义; 2、Torque Factor 扭矩分配系数 该参数仅在Differential Lock选择unlocked时激活; 扭矩分配系数等于Differential模块output2的扭矩值除以output1的扭矩值; 保持默认值1,即可; Cruise软件本身擅长的领域是车辆的纵向动力学仿真,虽然开发者们在车辆横向控制仿真方面做了一些努力,但和Carmaker、Carsim等软件相比,功能和仿真精度上都有一定差距; 上述Differential Lock和Torque Factor可能被设计用于spli-mu(对开)路面等工况的Climbing Performance或Maximum Acceleration in all Gears仿真,感兴趣的朋友可以自己研究下; 3、Inertia Moment In 输入侧转动惯量 4、Inertia Moment Out 1 输出侧1转动惯量 5、Inertia Moment Out 2 输出侧2转动惯量 关于转动惯量可以参考下“Gear Box模块-用户定义参数-Gear Box基本参数详解”中Inertia Moment In部分; 6、Efficiency 差速器机械传动效率 如本文前半部分所述,一般不单独定义此参数。 |


