AVL Cruise基础教程:Brake模块详解
摘要: AVL Cruise - Brake模块概述
AVL Cruise的Brake模块是Cruise车辆仿真模型的基础模块之一,在仿真过程中提供制动力数据用于车辆减速度的计算;
“Brake”模块不是必须的,在进行类似“Full Load Acceleration”等仿 ...
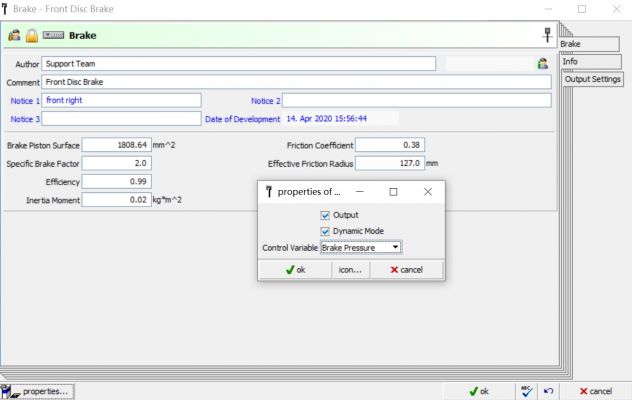 AVL Cruise - Brake模块概述 AVL Cruise的Brake模块是Cruise车辆仿真模型的基础模块之一,在仿真过程中提供制动力数据用于车辆减速度的计算; “Brake”模块不是必须的,在进行类似“Full Load Acceleration”等仿真任务时可以忽略Brake模块; 但它又不仅仅用于“Brake”仿真任务,如果车辆仿真模型中缺少“Brake”模块,在“Cycle Run”或“Cruising”仿真任务中,车速将因为减速度达不到要求而无法跟随循环工况的车速曲线; AVL Cruise - Brake模块 - Properties 1、Output 模块输出 勾选后,Brake模块的仿真过程数据(制动压强、制动扭矩等)会输出到仿真结果(可在Result Manager中查看),反之,则不输出(无法查看)。 建议按照默认设置,勾选。 2、Dynamic Mode 动态模式 若关闭此选项,当轮速低于特定阈值时,允许cruise软件使用简化算法进行制动器仿真,此时车轮将被视为固定在地面上,同时监控传动系作用在制动器上的力矩是否超出制动器所产生的制动力矩,从而随时恢复动态计算; 关闭动态模式可以节省一定的CPU和内存资源,但也会导致一系列的问题,例如制动器两侧的转速不相等; 建议保留默认的激活状态,一直使用动态模式进行制动器仿真; 3、Control Variable 控制变量 当选择“Brake Pressure”时,仿真时将由Cruise软件根据用户在数据总线中定义的“Brake Pressure”信号以及“Brake”模块“Brake”选项卡中定义的制动器参数计算制动力矩; 当选择“Braking Torque”时,仿真时不计算制动力矩,直接通过用户在数据总线中定义的“Braking Torque”信号获取; AVL Cruise - Brake模块 - 基本参数 在“Brake”模块“Brake”选项卡下用户可以定义制动器的基本参数。 1、Brake Piston Surface 制动分泵活塞面积 以缸径48mm的制动器为例,其活塞面积为:3.14*(48/2)^2 = 1809 mm^2; 2、Friction Coefficient 摩擦系数 由制动器摩擦片的材料决定,一般在0.35左右; 3、Specific Brake Factor 制动效能因数 对于盘式制动器,后制动器一般为1,前制动器如果是双缸(双制动分泵),为2,否则也为1; 对于鼓式制动器,可取2~3; 4、Effective Friction Radius 有效摩擦半径 注意这里需要输入的是半径而非直径; 5、Efficiency 制动效率 该参数被设计用来仿真制动管路中的液压转化为制动力矩过程中的能量损失(制动液发热),一般设为1或0.99即可; 6、Inertia Moment 转动惯量 原帖地址: https://autosim.club/thread-42-1-1.html |


